


Code verification & benchmarking
The procedure of testing the overall functionality of the PALM-4U components is organized into three categories:
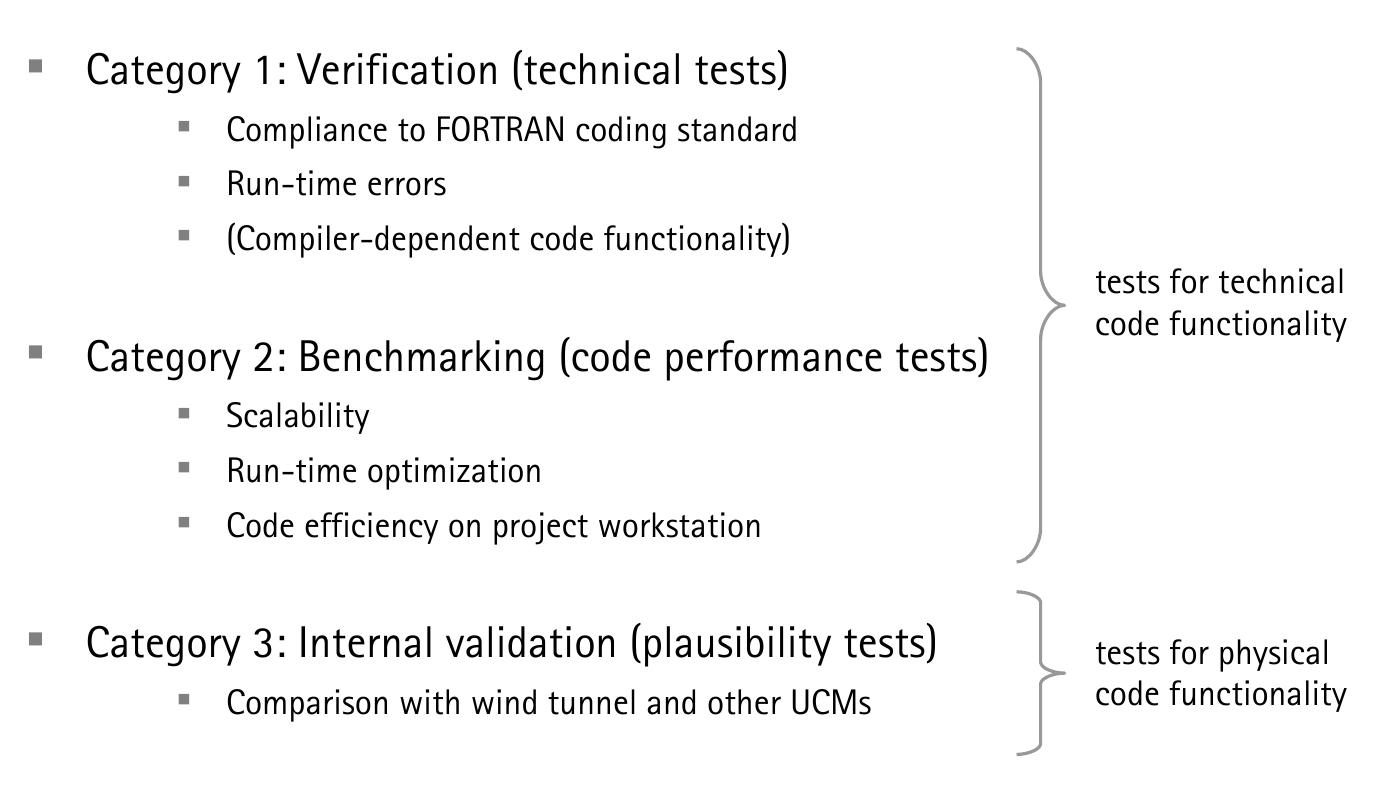 Fig 1: Testing categories.
Fig 1: Testing categories.
Simulation setups for category 1
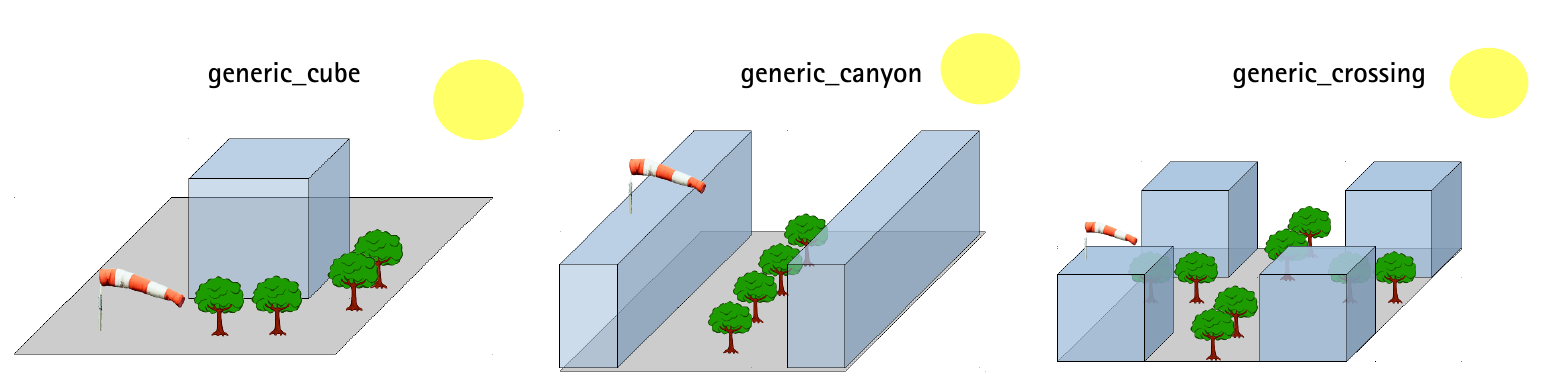
Category 1 includes checks of the PALM-4U source code for compliance to the general FORTRAN coding standard, as well as to the specific PALM formatting rules. Further, the code is tested for run-time errors as well as compiler-dependent functionality issues, and simulation results are checked for elementary plausibility. For this purpose (S)mall setups are sufficient, suitable to run on desktop PCs (2-4 processor cores) within a time frame of O(1-10min).
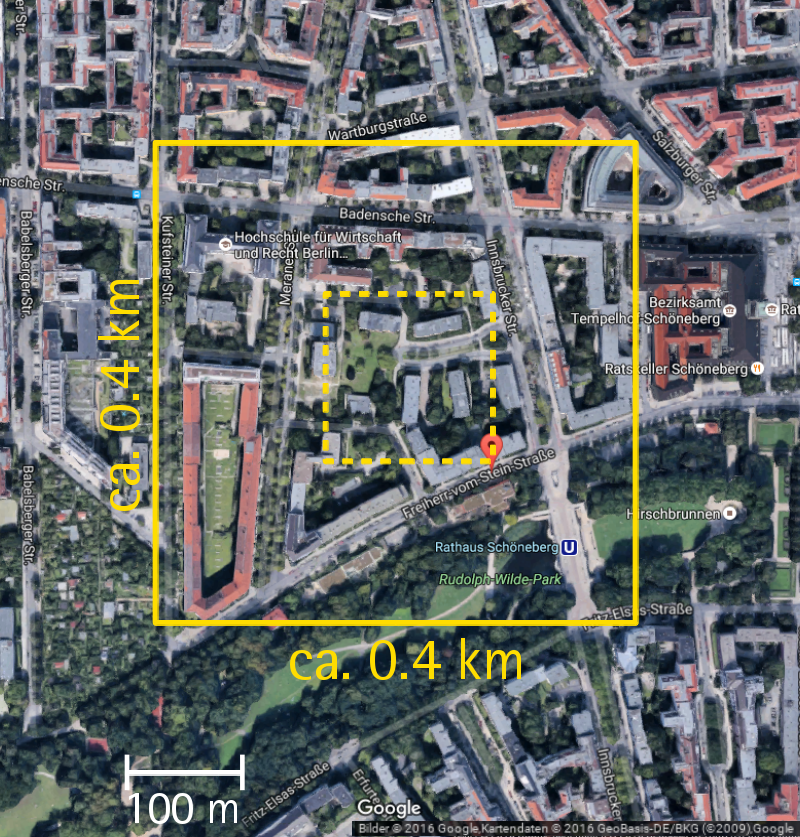
Since the release of PALM 5.0, PALM-4U enables the use of NetCDF input files, the so-called static and dynamic drivers, as input data for the PALM model system. The drivers are based on the PALM Input Data Standard (PIDS). The former generic_* setups don't work anymore. Instead, we created a new street-crossing setup (see Fig. 2), which contains all so far available PALM-4U components, and is driven by a static driver. To summarize the setup:
|
|

The test_urban.zip archive contains the required INPUT files
- test_urban_p3d (parameter file)
- test_urban_static (static driver)
as well as the MONITORING and OUTPUT files, an NCL script for creation of the static driver, and a README file with the setup documentation.
The previous test_urban setups that worked with PALM r2770 and PALM r2957 are also still available (test_urban_r2770.zip, test_urban_r2957.zip)
NOTE: Additional and more feature-specific setups can be created on an as-needed basis.
Simulation setups for category 2
Two differently sized setups are defined:
- (M)edium setup (see Fig. 3) for run-time optimization tests, and verification of the code efficiency on the MOSAIK demonstration PC
- (L)arge setup (see Fig. 4) for code scalability tests on a high-performance computing system (HLRN) with up to tens of thousands processor cores.
The base of PALM-4U -- PALM -- is highly optimized and its performance scales well up to 40,000 processor cores. PALM-4U shall maintain this high level of performance optimization.
The final formulation of setup files is postponed until the new INPUT data structure is implemented to PALM.
|
|

Simulation setups for category 3
These setups will be formulated once a decision has been made (in coordination with module B & C partners) which UCMs to apply. On MOSAIK's side, ENVIMET, FITNAH, and MUKLIMO_3 are on the shortlist. Selected setups must be compatible to run with PALM-4U as well as with the UCM of choice.
Attachments (12)
- testing_categories.png (128.0 KB) - added by kanani 9 years ago.
- generic_setups_small.png (74.1 KB) - added by kanani 9 years ago.
- generic_cube.zip (7.9 MB) - added by kanani 9 years ago.
- generic_canyon.zip (7.0 MB) - added by kanani 9 years ago.
- generic_crossing.zip (7.9 MB) - added by kanani 9 years ago.
- medium_complex_setup.png (1.4 MB) - added by kanani 9 years ago.
- large_complex_setup.png (952.6 KB) - added by kanani 9 years ago.
-
test_urban_r2770.zip
(11.8 MB) -
added by kanani 8 years ago.
Simulation setup for a generic crossing (working with r2770)
-
sketch_test_urban.png
(174.1 KB) -
added by kanani 8 years ago.
Sketch for test_urban setup
- test_urban_r2957.zip (30.3 MB) - added by kanani 8 years ago.
- test_urban.zip (31.0 MB) - added by suehring 8 years ago.
- sketch_test_urban.odg (88.1 KB) - added by kanani 7 years ago.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Download in other formats:
Powered by Trac 1.0.5
By Edgewall Software.
Visit the Trac open source project at
http://trac.edgewall.org/