


WP-S5.2: Erwerb von Open-Source-Daten und automatische Erstellung von Oberflächeneingangsdaten
Projektziele:
TP2 befasst sich mit den Oberflächeneingangsdaten für PALM-4U und hat zum Ziel diese zu verbessern. Erstens sollen Open-Source-Datensätze gesammelt werden woraus die Eingangsdaten automatisiert abgeleitet werden können. Hierbei liegt der Fokus auf Deutschland- bis weltweit frei verfügbaren Datensätze. Zweitens werden Möglichkeiten untersucht, wie neue Eingangsdaten erstellt werden können um neue Simulationen in PALM-4U zu unterstützen. Mögliche Eingangsdaten sind z.B. Fensterflächenanteil, Farbe der Fassade oder verbesserte 3D-Beschreibungen von Bäume und Gebäude, z.B. aus LiDAR Daten. TP2 des Verbundprojekts umfasst das Arbeitspaket WP-S5.2.
Aufgabenstellung:
I) Entwicklung analysefähiger Oberflächendatensätze
Die Arbeit in der MOSAIK-Phase 1 zeigte, wie wichtig eine automatisierte Generierung von Oberflächeneingabeparametern sowie die Bereitstellung von analysefertigen Daten ist. Da nicht in allen Gemeinden dieselben Daten auf derselben Detailebene verfügbar sind, wurde es als wichtig erachtet, Basisschichten bereitzustellen, die konsistent eine Mindestmenge an räumlichen Eingabeparametern bereitstellen, die bei Bedarf durch lokale Parameter ergänzt werden können. Dieser Basisdatensatz sollte nach Möglichkeit nur aus frei zugänglichen Daten bestehen, damit sie für alle Anwender zur Verfügung gestellt werden können, die PALM-4U testen möchten. Viele Open-Access-Daten existieren nicht nur für Deutschland, sondern auch für Europa und weltweit. Solche Eingangsdaten ermöglichen daher potentiell auch die Übertragbarkeit von PALM-4U auf Städte außerhalb Deutschlands. Zusätzlich zum Ableiten und Bereitstellen der Datenschichten selbst wird daran gearbeitet, eine eigenständige Datenabrufsoftware zu erstellen und zu dokumentieren, die dann mit PALM-4U verteilt werden kann und das eigenständige Abrufen und Aufbereiten von Eingabedaten auch auf Benutzerseite ermöglicht.
II) Entwicklung von Methoden zur Integration neuer hochauflösender Eingabedaten.
Zusätzlich zur Notwendigkeit eines konsistenten Basisdatensatzes wurde während der Entwicklung von PALM in MOSAIK-1 der Bedarf an weiteren räumlichen Eingabeparametern festgestellt. Daher besteht das zweite Ziel dieses Arbeitspakets darin, neue Methoden zur Ableitung von Detailinformationen zu untersuchen, die in anderen veröffentlichten Datensätzen nicht ohne weiteres verfügbar sind. Insbesondere möchten wir die Beschreibung der Gebäudeeigenschaften anhand von Luftbildern mithilfe neuartiger Ansätze des maschinellen Lernens verbessern.
Projektstruktur:
Das Projekt wird am Deutschen Zentrum für Luft-und Raumfahrt in Oberpfaffenhofen durchgeführt.
PI: Julian Zeidler
Projektmitarbeiter: Dr. Benjamin Leutner
Bisheriger Fortschritt:
I) Abrufen und Aufbereiten von Eingangsdaten Basiseingangsdatensätze für PALM-4U wurden aus Open-Access-Datenquellen kuratiert und an die Projektpartner verteilt. Dies umfasst Datensätze wie Vegetationshöhen, Oberflächenmaterialien oder Gebäudehöhen.
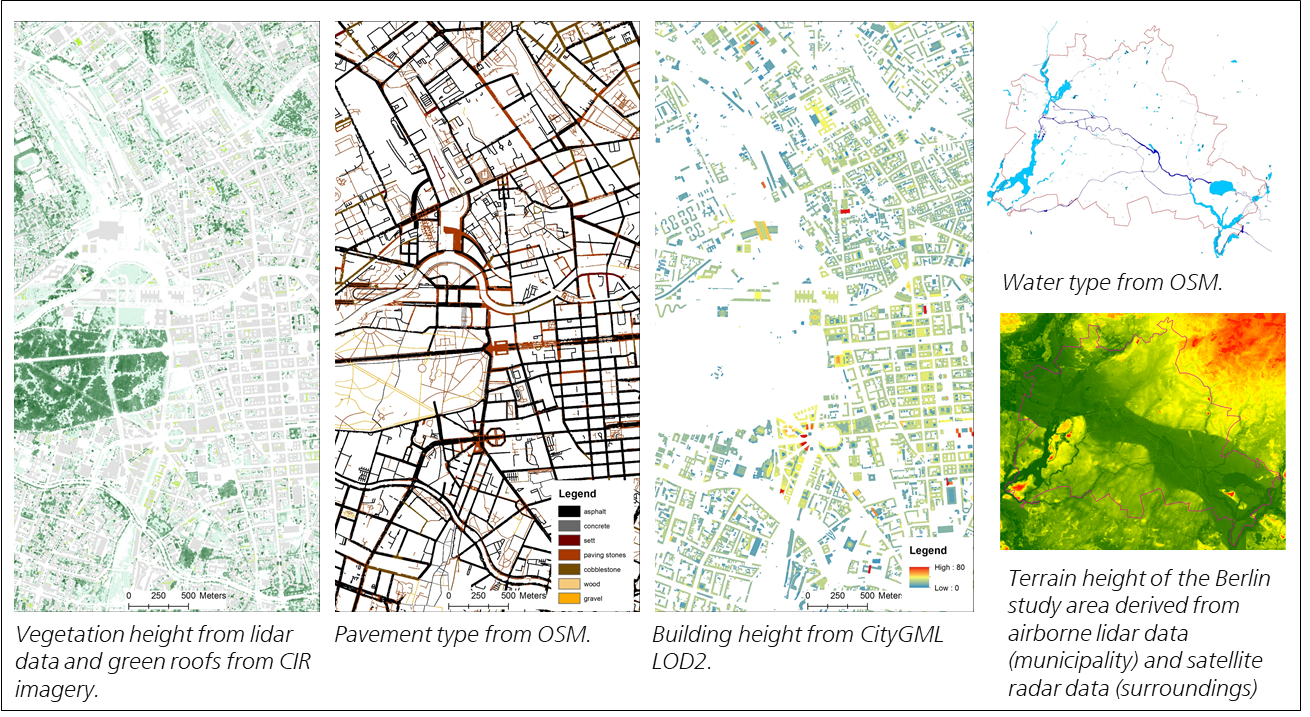
Abbildung 1: Beispiele für Eingabeparameter (Teile davon) des Untersuchungsgebiets Berlin für PALM-4U. Erstellt vom DLR. Datenquellen: FIS Broker Berlin (LiDAR, CIR-Bilder, CityGML), Open Street Map (OSM) und SRTM.
II) KI-basierte Extraktion von Gebäudeinformationen aus Luftbildern.
Jüngste Entwicklungen im Bereich der künstlichen Intelligenz ermöglichen einen immer detaillierteren Informationsabruf aus sehr hochauflösenden Bildern. In dieser Aufgabe untersuchen wir das Potenzial von Schrägblick-Luftbildern, um detaillierte Informationen zu Gebäudefassaden abzurufen. Zu diesem Zweck wurde ein Deep-Learning-basierter Klassifikator implementiert und trainiert, der eine Instanzsegmentierung für zweidimensionale Bilder durchführt.
Hier wird die Fassadenfensterfläche, eine wichtige Komponente des Wärmeaustauschs von Gebäuden, anhand von Texturbildern aus einem 3D-Stadtmodell Berlins (LOD2 CityGML) abgeleitet. Trainingsdaten, die aus öffentlich verfügbaren Datensätzen stammen, wurden in einer ersten Iteration verwendet, um ein Mask-RCNN-Modell zu trainieren. In einem zweiten Transfer-Lernschritt wurde das Modell auf manuell klassifizierte 2D-Bilder der Fassaden abgestimmt, die aus den LOD2-Daten extrahiert wurden. Dieses endgültige Modell wurde validiert und verwendet, um alle Fassadentexturen aus den LOD2-Daten zu klassifiziern und so eine Karte der Fassadenfensteranteile zu erstellen.
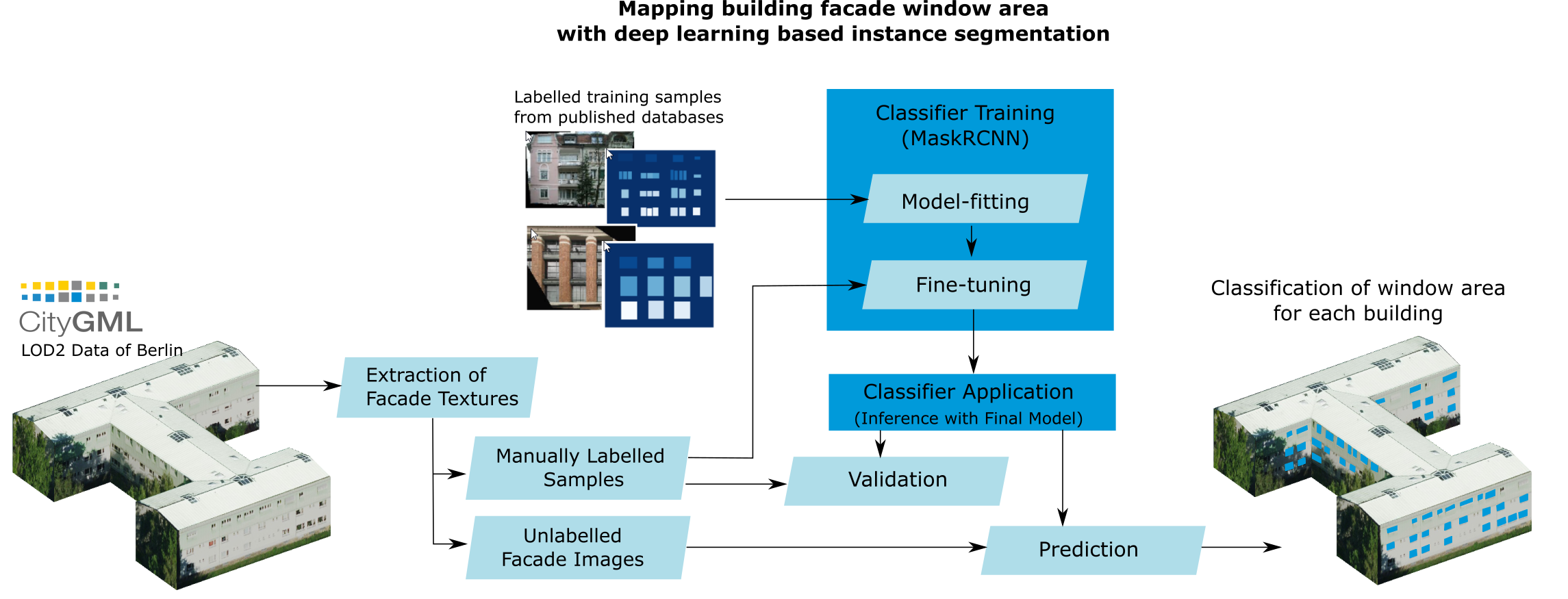
Abbildung 2: Modellbasierte Extraktion der Fassadenfensterfläche aus Schrägblick-Luftbildern (CityGML LOD2) mithilfe eines Instanzsegmentierungsalgorithmus.
Referenzliteratur:
Heldens, Maronga, Zeidler, Kanani-Sühring, Hanke, Esch (2019): Remote sensing-supported generation of surface descriptors for a highly detailed urban climate model. Joint Remote Sensing Event 22-24 May, 2019, Vannes, France.
Masson, Heldens, Bocher, Bonhomme, Bucher et al. (2020): City-descriptive input data for urban climate models: Model requirements, data sources and challenges. Urban Climate. Vol. 31, 100536, doi: 10.1016/j.uclim.2019.100536.
Heldens, Zeidler, Pavlik, Burmeister, Kanani-Sühring, Maronga, Esch (submitted): Geospatial input data for the PALM model system 6.0: model requirements, data sources, and processing. Submitted to Geoscientific Model Development.
Kontaktdaten:
Julian Zeidler
Julian.Zeidler[at]dlr.de.
Deutsches Zentrum für Luft u. Raumfahrt e.V. (DLR)
Earth Observation Center (EOC), Deutsches Fernerkundungsdatenzentrum (DFD)
Abt. Dynamik der Landoberfläche, Team Smart Cities und Raumentwicklung Oberpfaffenhofen, Deutschland
Attachments (2)
- WP-S52-figure1.png (1.2 MB) - added by hettrich 5 years ago.
- WP-S52-figure2.png (600.2 KB) - added by hettrich 4 years ago.
{kind=link}
{kind=link}
Download all attachments as: .zip
Download in other formats:
Powered by Trac 1.0.5
By Edgewall Software.
Visit the Trac open source project at
http://trac.edgewall.org/