
Wind turbine model
This page is under construction!
Overview
Since r1916 a wind turbine model (WTM) is included in PALM that parameterises the effect of individual wind turbines on the flow. The PALM WTM is based on an advanced actuator disk model approach. It contains a turbine controller including speed control, pitch control and yaw control. By default, the PALM-WTM includes the publicly available data for the NREL 5 MW reference turbine (Jonkman et al., 2009), but it can be adapted for "real" turbine data as described below.
Technical description of the PALM-WTM
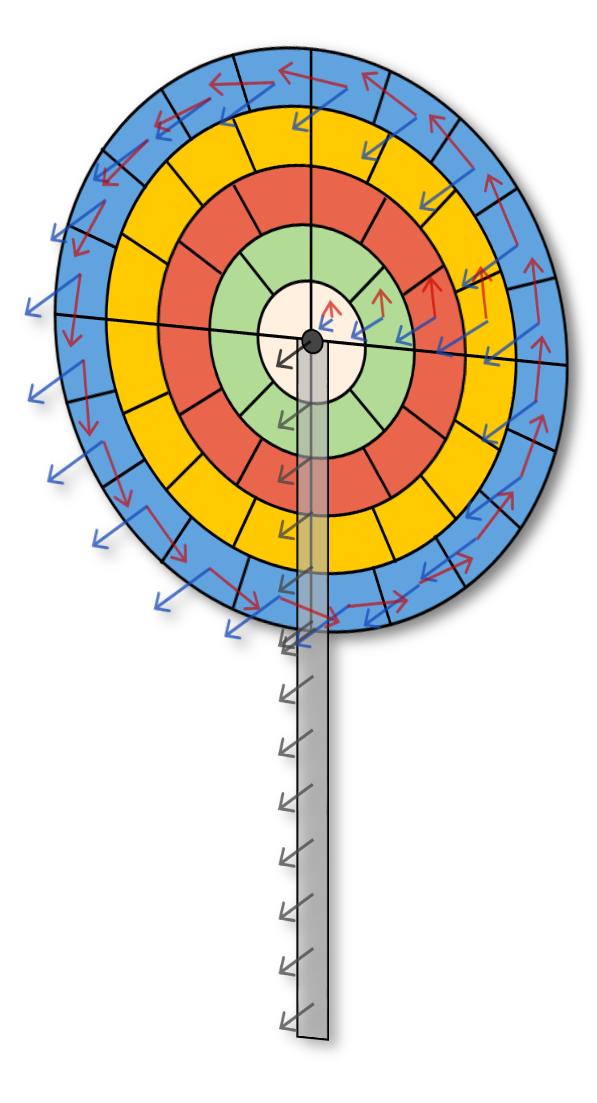
The PALM-WTM is based on the common actuator disk model (ADM) approach in which the rotor of a wind turbine is represented by a permeable disk that extracts energy from the flow by applying a thrust force at the disk. While in the frequently used simple version of the ADM (e.g. as proposed by Calaf et al. (2010) the forces are uniformly distributed and only the thrust force is considered (thus ignoring the torque), the WTM provides an advanced ADM (ADM-R) that considers varying forces over the rotor disk and rotation of the rotor blades although these are not resolved. The basic concept is similar to the ADM-R proposed by Wu and Porté-Agel (2011) with several modifications. The rotor plane is divided into rings and segments such that the segments have an equal size which is a function of the grid spacing (see Figure 1 (left)).


Figure 1 (right): Schematic representation of the advanced actuator disk method with the rotor disk segments and the axial (blue arrows) and tangential (red arrows) forces acting on the flow. The grey arrows are representing the tower thrust force.
Figure 1 (left): Descriptive illustration of the forces acting on a blade element.
For each segment the local lift and drag forces fl and fd per unit area are calculated:

Urel is the local relative velocity in the centre of the segment. It is calculated from the local wind speed components (interpolation from the nearest grid points) and the velocity of the blades. cl and cd are the lift and drag coefficients of the blades, respectively, which vary along the blade. The factor

represents the solidity ratio of the rotor blades (with the number of rotor blades Nb, the chord c and the distance of the segment from the centre of the rotor disk rseg). The blade properties have to be specified by the user. By default, the WTM includes publicly available data for the NREL 5 MW reference turbine (Jonkman et al., 2009).
In a second step, the lift and drag forces are projected onto the axial and tangential planes, multiplied by a factor of -1 (Newton's third law):

with the angle φ between the tangential wind speed component and the wind speed relative to the rotor blade element (see Figure 1 (right))

where UN is the velocity in axial direction and Uθ the velocity in tangential direction (along the circular movement of the rotor blade element, as shown in Figure 1 (right)).Ω denotes the rotational speed of the rotor.
Finally, the forces are smeared and interpolated to the cartesian PALM grid. To optimise the performance of the time-consuming 3d smearing process. the smearing is done with a Polynomial function instead of the standard Gaussian smearing and confined to the region around the rotor:

It is being summed over the number of rotor segments Nseg. η is the regularisation kernel which is a function of distance db,r(x,y,z) between the center of the current rotor segment and each PALM grid point:

ϵmin denotes the zero of the polynomial function and thus confines the region where the smearing is applied (position of current rotor segment +/- ϵmin in all directions):

The smearing width ϵ is set to twice the grid spacing the horizontal grid spacing which has turned out to be a reasonable value (see e.g. Troldborg et al. (2013)).
The effect of the tower and nacelle are considered by a simple drag force approach:

where fd,t and fd,n are the drag forces of the tower and the nacelle, respectively, with their drag coefficients cd,t and cd,n. Per default, cd,t = 1.2 and cd,n = 0.85. These values can be changed in the parameter namelist.
The WTM contains a wind turbine controller including speed control, pitch control and yaw control which can be switched on and off separately. The baseline generator torque speed and pitch controller is implemented as described in Jonkman et al. (2009) and is only valid for the NREL 5 MW reference turbine. For different turbine types, the speed controller has to be adjusted. The yaw controller is implemented following Storey et al. (2013) and allows active and automatic yaw control.
How to use the PALM-WTM with the provided NREL 5MW turbine data
Your PALM copy includes an example case (starting from r1914) under trunk/TESTS/cases/wind_turbine_model.
We recommend using the most recent PALM version as the wind turbine model is updated from time to time bugs are fixed.
The steering parameters for the wind turbine model are listed and described here.
In case of any question, please do not hesitate to contact Dr. Gerald Steinfeld (ForWind, Carl von Ossietzky Universität Oldenburg): gerald.steinfeld <at> uol.de
How to use the PALM-WTM with other turbine data
Coming soon...
Example setup
The example run for using the wind turbine model in PALM is called "wind_turbine_model" and can be found at trunk/TESTS/cases/wind_turbine_model. This example shows the application of an enhanced actuator disc wind turbine model (Actuator Disc Model with Rotation, ADM-R) in PALM. The model is based on blade elements and conversion of airfoil lift and drag coefficients from the NREL 5MW reference turbine to local forces on the flow (see above). The example simulates 4 different turbines in a turbulent shear flow. After 30s of simulated time, the turbines start to correct their orientation by use of a yaw controller.
For the input, you need the common steering file (wind_turbine_model_p3d), which defines, among other things, cyclic lateral boundary conditions and constant potential temperature (300K) and constant geostrophic wind (ug = 6 m/s) profiles for initialization. To run the wind turbine model successfully, a second file is needed. It's called _wtm (wind_turbine_model_wtm. It consists of important properties of the NREL 5MW model turbine and will be automatically read by PALM To start the model, no further modifications are necessary if you use one of the default .palm.config-files in trunk/SCRIPTS/. The palmrun call reads:
palmrun -r wind_turbine_model -a "d3#" -c imuk_default -T 4 -X 4
The monitoring files you get after the run (wind_turbine_model_rc and wind_turbine_model_wtm_T01-T04) should be similar to the attached files. They were created with revision 4054. No postprocessing of the data is required.
References
- Calaf M, Meneveau C, Meyers J 2010. Large eddy simulation study of fully developed wind-turbine array boundary layers. Phys. Fluids, 22, 015110, doi:10.1063/1.3291077.
- Jonkman JM, Butterfield S, Musial W, Scott G 2009. Definition of a 5-MW reference wind turbine for offshore system development. Technical Report NREL/TP-500-38060, National Renewable Energy Laboratory, Golden, Colorado.
- Storey R, Norris S, Cater J 2013. Large Eddy Simulation of Wind Events Propagating through an Array of Wind Turbines. Proceedings of the World Congress on Engineering 2013 Vol III, WCE 2013, 3–5 July 2013, London, UK, 2013.
- Troldborg N, Sørensen JN, Mikkelsen R, Sørensen NN 2013. A simple atmospheric boundary layer model applied to large eddy simulations of wind turbine wakes. Wind Energy, 17(4), 657-669, doi:10.1002/we.1608.
- Wu Y-T, Porté-Agel F 2011. Large-Eddy Simulation of Wind-Turbine Wakes: Evaluation of Turbine Parametrisations. Boundary Layer Meteorol., 138, 345-366, doi:10.1007/s10546-010-9569-x.
Attachments (7)
- ADM-R_neu.png (265.1 KB) - added by witha 6 years ago.
- Fig3-BEM-Illustration.png (130.7 KB) - added by witha 6 years ago.
- wind_turbine_model_rc (66.8 KB) - added by Giersch 6 years ago.
- wind_turbine_model_wtm_T01 (32.5 KB) - added by Giersch 6 years ago.
- wind_turbine_model_wtm_T02 (32.5 KB) - added by Giersch 6 years ago.
- wind_turbine_model_wtm_T03 (32.5 KB) - added by Giersch 6 years ago.
- wind_turbine_model_wtm_T04 (32.5 KB) - added by Giersch 6 years ago.
{kind=link}
{kind=link}
Download all attachments as: .zip